
LPNAV: 無人搬送車(AGV)ポジショニングシステム
概観
LPNAVは、無人搬送車(AGV)ナビゲーションシステムで、IMU、カメラ、GNSS、オドメトリデータを組み合わせて正確な位置情報を計算します。 車両の位置を正確に検出することは、真空掃除ロボットや自動運転車など、多くのタイプのロボットデバイスにとって重要です。</ p>
屋外環境では、GPSを使用してサブメートルの精度で位置を特定できます。 GPSですが、屋内で精度が出ません。追跡ビーコンやマーカーなど、位置情報を取得する他の方法を使用する必要があります。</ p>
通常、単一の追跡方法では、より高い精度とシステムの応答性を提供するには不十分です。 LPNAVでは、慣性測定ユニット(IMU)のコアテクノロジーに基づくモジュラーソリューションを導入しています。さまざまな信号源を融合して、正確で信頼できる位置情報を計算できます
応用分野

無人搬送車(AGV)

自動運転

倉庫物流
サポートされる入力ソース
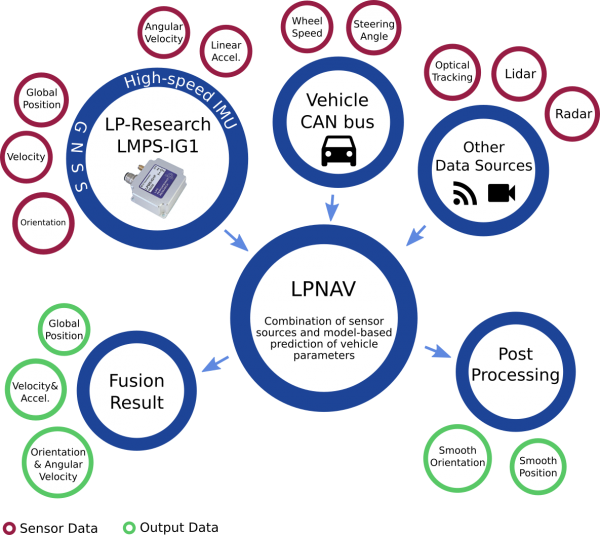
複数のデータソースを組み合わせる方法はセンサーフュージョンと呼ばれ、センサーデータが利用できない場合やセンチメートルレベルの精度で信頼できない場合に、車両のダイナミクスとステアリングシステムの正確なモデリングにより、車両の運動パラメーターを予測できます。
LPNAVは、グローバルナビゲーション衛星システム(GNSS)、屋内の光学ナビゲーションシステム、カメラソースなどのさまざまなセンサーソースからのデータを処理して、車両の位置と向きの最適な推定値を計算できます。
データの例
フォークリフト追跡
倉庫内のフォークリフトを追跡するために、フォークリフトCANバスから収集されたオドメトリデータとLPMS-IG1 IMUからの方向データを組み合わせるセンサーフュージョンシステムを開発しました。 アルゴリズムの精度を示すために、結果の位置データをGPS参照と比較しました。 実際のアプリケーションの場合、オドメトリとIMUの融合の結果は、光学トラッキングソース、RTK-GPSなどからのグローバルリファレンス信号でさらに強化できます。
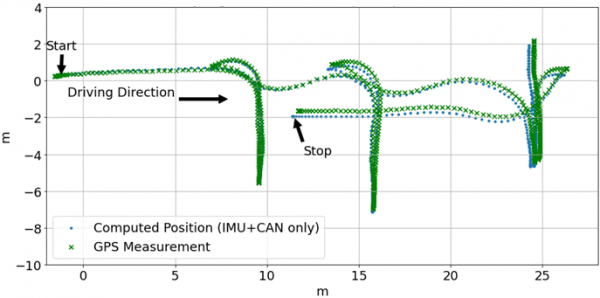
上の図は、パレットのピックアップと配置をシミュレートするために前後に走行するJungheinrichフォークリフトを示しています。 IMUおよびCANBUSデータを使用して計算された位置の累積誤差は、基準GPS測定と比較して0.46mです。
自動車追跡
IMU +オドメトリトラッキングは、GPSが利用できない場所や信号が信頼できない場所での自動車の位置を特定するためにも機能します。 以下の画像は、都市環境で走行する2 kmのルートを示しています。 左側のグラフは参照トラックを示し、右側のグラフはIMU +オドメトリデータのみから計算されたトラックを示しています。 車はドライブの終わりにスタート地点に戻りました。 計算された始点と終点の間隔は5m未満です。
仕様書
| Product name | LPNAV |
| Supported Platform | Linux (ARM, x64) and Windows |
| Packaging Options | Standalone application with web interface Dynamic library Unity plugin |
| API options | C-API and REST web API |
| Vehicle models | Four-wheeled vehicle with Ackermann steering model Two-wheeled vehicle Simplified vehicle model with one wheel |
| Supported inertial measurement unit | LPMS-IG1 high-precision 9-axis inertial measurement unit LPMS-IG1P high-precision 9-axis inertial measurement unit with GPS receiver and optional centimeter-level RTK-GPS unit |
| Supported vehicle dynamics sources | CANBUS interface via OBD-II and PEAK-CAN-USB for direct access to CANBUS data |
| Supported absolute positioning input | Global Navigation Satellite System (GPS, GLONASS, BeiDou, Galileo), interface for indoor positioning input NMEA source via network or serial port |
| Position and Orientation update rate | Up to 1000 Hz |
注文
こちらにご連絡ください。