
Virtual Dashboard Demonstration
This is a follow-up post to the introduction of our in-vehicle AR head mounted display LPVIZ part 1 and part 2.
To test LPVIZ we created a simple demo scenario of an automotive virtual dashboard. We created a Unity scene with graphic elements commonly found on a vehicle dashboard. We animated these elements to make the scene look more realistic.
This setup is meant for static testing at our shop. For further experiments inside a moving vehicle we are planning to connect the animated elements directly to car data (speed etc.) communicated over the CAN bus.
The virtual dashboard is only a very simple example to show the basic functionality of LPVIZ. As described in a previous post, many a lot more sophisticated applications can be implemented.
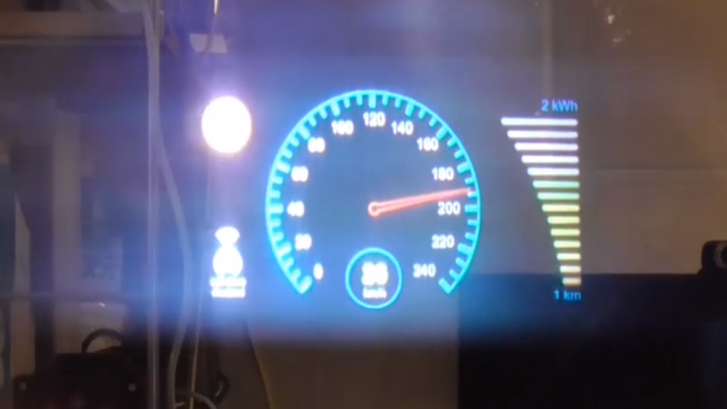
The video above was taken through the right eye optical waveguide display of LPVIZ. We took this photo with a regular smartphone camera and therefore it is not very high quality. Nevertheless, it confirms that the display is working and correctly shows the virtual dashboard.
The user is looking at the object straight ahead. In case the user rotates his head or changes position, his view of the object will change perspectively. An important point to mention is the high luminosity of the display. We took this photo with the interior lighting in our shop turned on normally, and without any additional shade in front of the display.