New Distributor: Visit The Zenshin Tech Shop For Our Motion Sensors
New worldwide distribution by Zenshin Technology Ltd
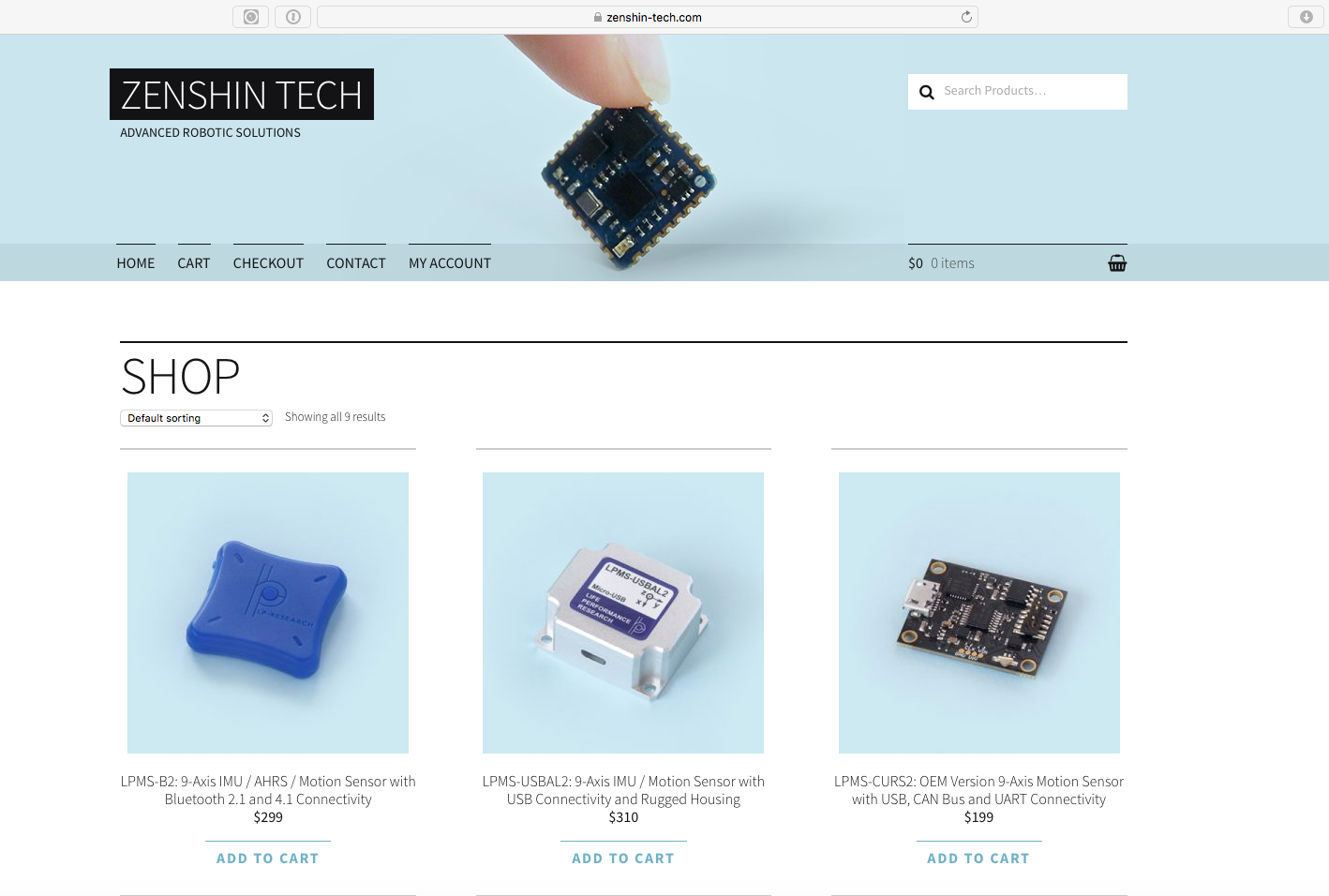
Getting our IMU sensors online has just become so much easier. Create your own innovations and simply order at our new worldwide distributor: Zenshin Technology Ltd is an online shop operating from Hong Kong. Have a look at our next generation IMUs and explore the optimized features of for example, the LPMS-CURS2 (9-axis motion sensor with USB, CAN bus and UART connectivity) or the LPMSs-CANAL2 (9-axis IMU with CAN connectivity and waterproof housing).
In addition to our distributors in every region, you can get LP-RESEARCH’s IMU sensors now from Zenshin Tech. Order comfortably with worldwide express shipping from here: https://zenshin-tech.com