
One of the trickiest things for reliably measuring orientations with the LPMS is the calibration of the magnetic field sensor. The functionality of the sensor is essential for determining the yaw angle of the sensor without drift. If we used only the gyrsocope to measure the yaw angle a drift of a few angles would already occur after 10 or 20 seconds of movement.
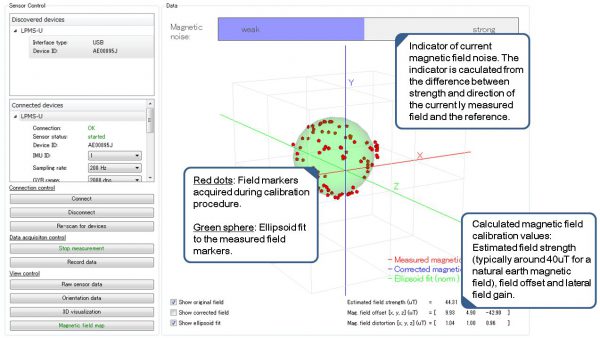
The normally spherical shape of the environment magnetic field is, especially in the vicinity of metal or electric circuits, often distorted to an ellipsoid. Such distoritions are efficiently compensated by calibrating the LPMS. However it is hard for the user to see if the calibration was successful or what the resulting data means about the surrounding electromagnetic field. Therefore we added a visualization of this data to the control software of the sensor (LpmsControl) that is to give a better understanding of the calibration results (see image below).
We use a special algorithm to reduce the influence of a distorted magnetic environment field on the orientation measurements of the sensor. A comparison of orientation tracking without and with using this algorithm is shown below.